Zhihao Lin
Ph.D. in Autonomous Systems & Connectivity, University of Glasgow.

Zhihao Lin, Ph.D.
University of Glasgow
Glasgow, U.K.
I received my Ph.D. in Autonomous Systems & Connectivity from the University of Glasgow in June 2026, supervised by Dr. Jianglin Lan. 📬 Open for postdoctoral positions from Sept. 2026.
My research centres on representation learning for reinforcement learning, asking: what should an RL agent learn to see, so that it can act well?
This question grew out of my early work on autonomous driving, where I kept running into the same quiet puzzle: better perception did not automatically lead to better decisions. The gap between seeing and acting never felt like something more data or bigger models would simply close — it seemed to point at something more fundamental about how an agent’s understanding of the world becomes the way it chooses to act. That gap is what I keep returning to.
My Ph.D. work approaches it from three angles:
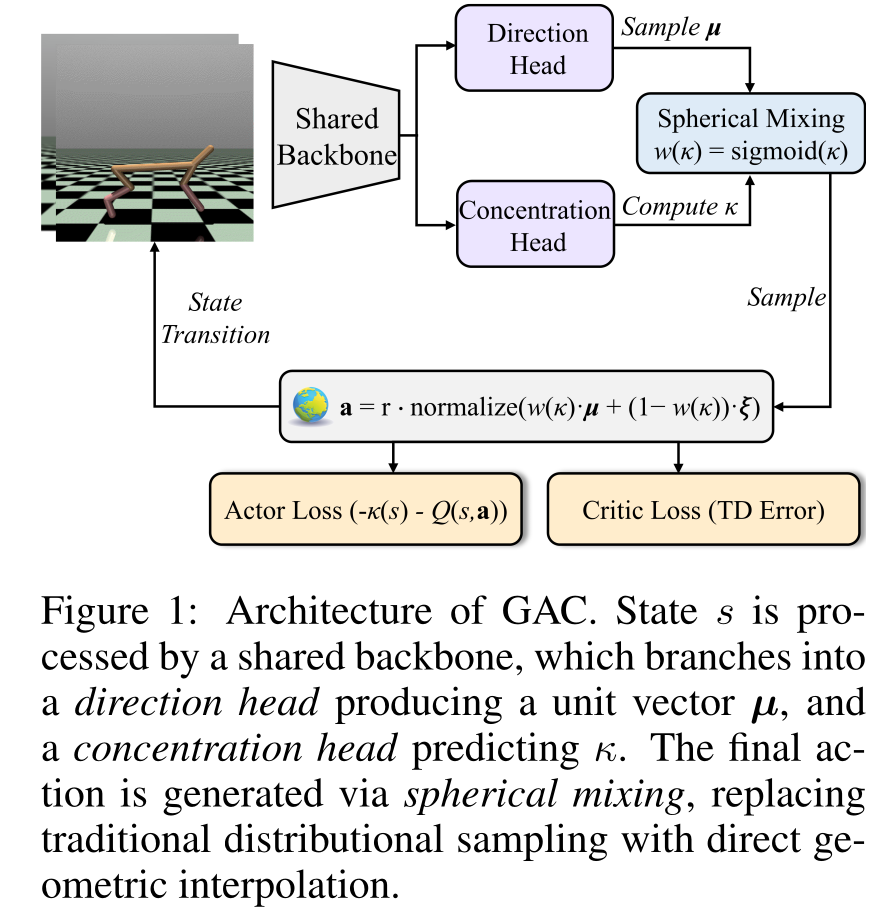
- Geometric policy optimisation (GAC, ICLR 2026): treating bounded action spaces as a geometric constraint rather than an afterthought — replacing Gaussian policies and their ad-hoc squashing with an efficient spherical formulation that decomposes each action into a direction vector and a learnable concentration parameter.
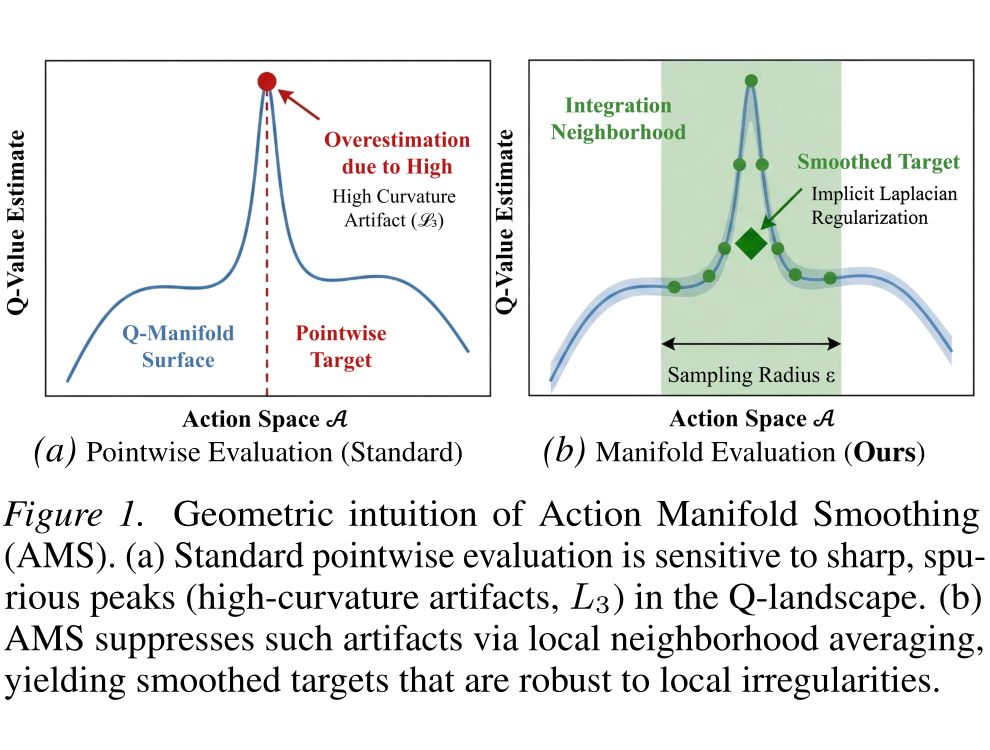
- Action Manifold Smoothing (AMS, ICML 2026): stabilising high-dimensional continuous control by replacing point-wise temporal-difference targets with orthogonally-sampled neighbourhood averages, taming the multiplicative Lipschitz-pathway error amplification that makes algorithms like TD3 and SAC collapse.
- World-model-guided representation learning (NeurIPS 2026, under review): using a world model not as a simulator but as a structured supervision tool, shaping an encoder whose representations are simultaneously predictive and value-aware.
On the side, I have a deep personal interest in theoretical physics, particularly the information-theoretic foundations of gravity and cosmology.
I am always happy to chat about RL, world models, embodied intelligence, or the physics of spacetime. Feel free to reach out.
news
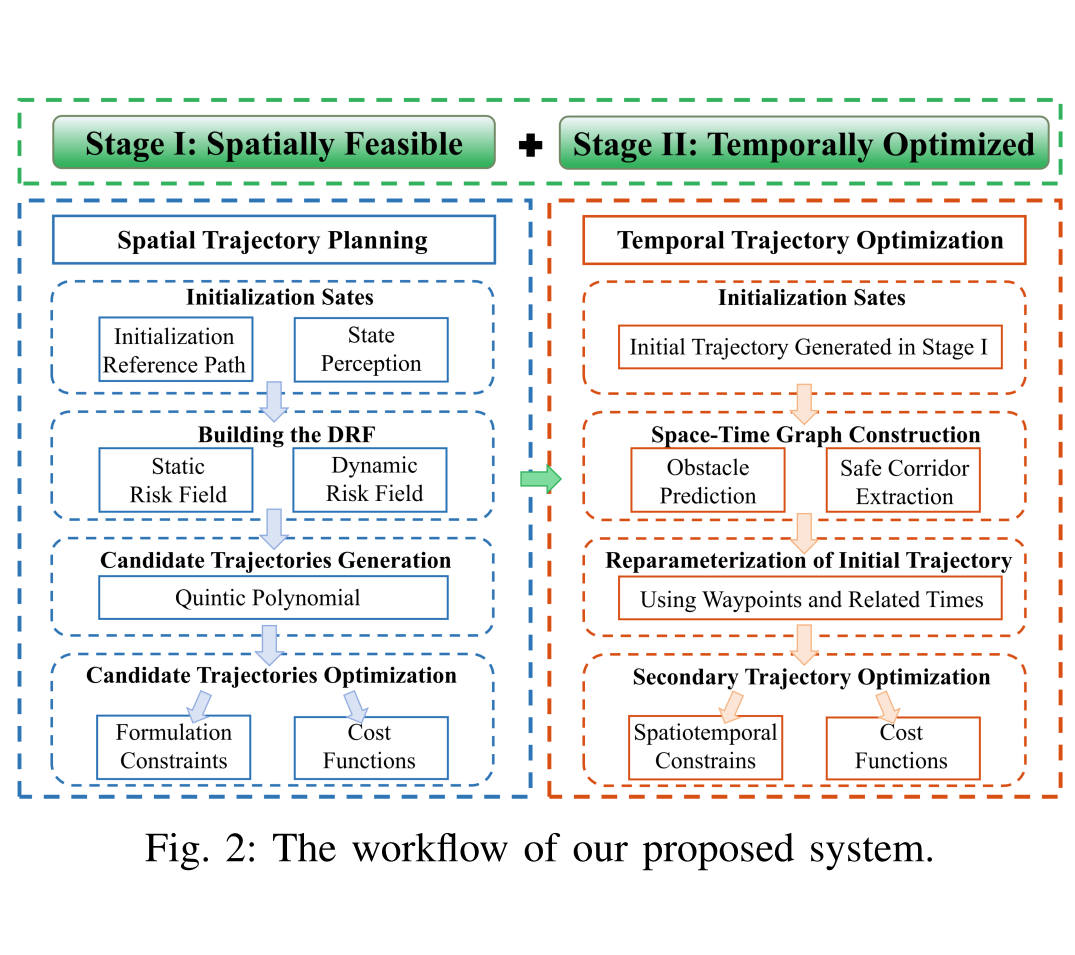
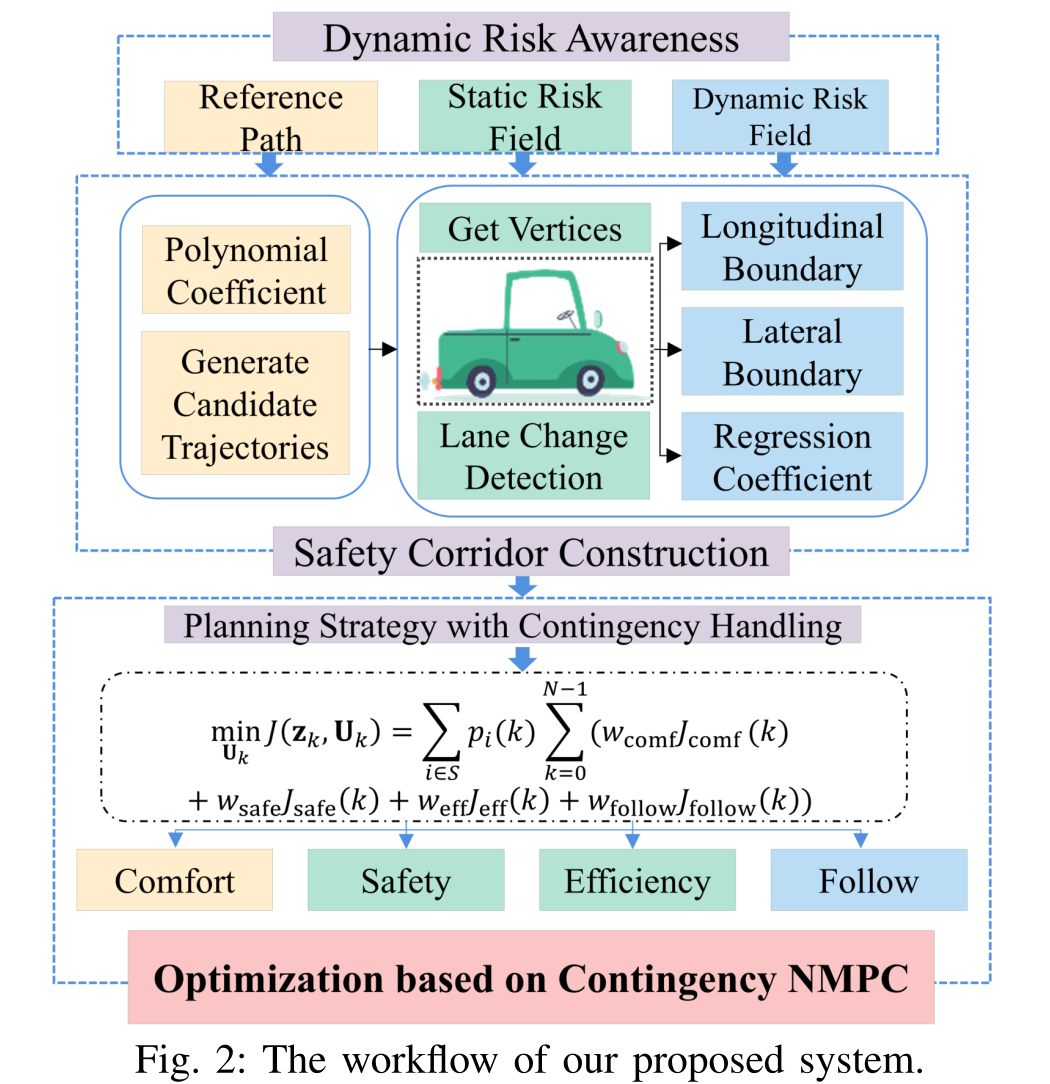
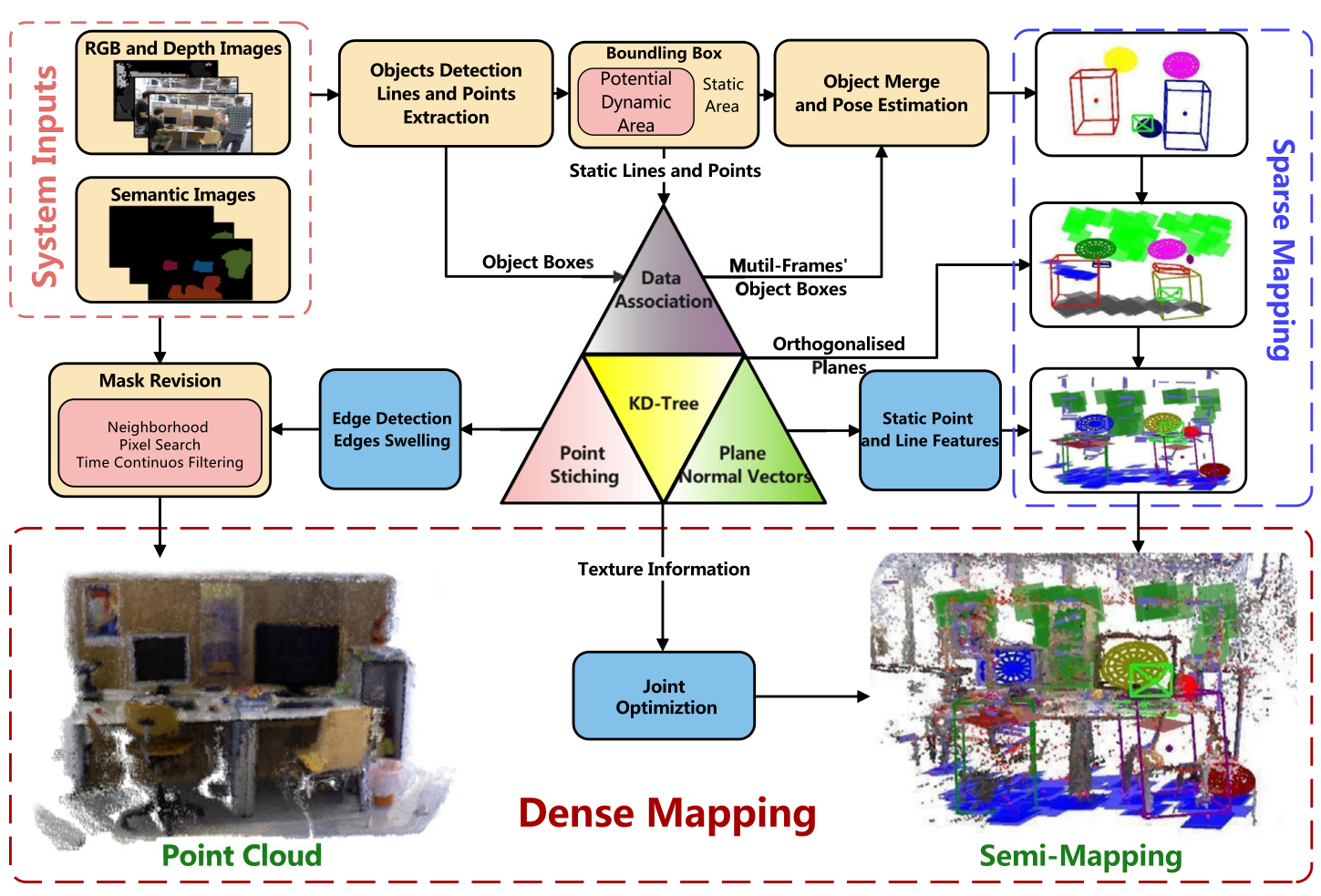
| Jun 24, 2026 | Three papers accepted 🎉 — Dual-Mode SPL-SLAM (co-first author) in IEEE Transactions on Intelligent Transportation Systems, and two first-author papers in IEEE Transactions on Vehicular Technology: Hierarchical Multi-Agent MCTS for Safety-Critical Coordination in Mixed-Autonomy Roundabouts and A Two-Stage Spatiotemporal Trajectory Optimization Framework for Autonomous Lane Changing With Dynamic Risk Fields. |
|---|---|
| May 15, 2026 | My sole-authored paper Action Manifold Smoothing: A Lipschitz Pathway Perspective on High-Dimensional Reinforcement Learning has been accepted to ICML 2026 (CORE A*). 🎉 |
| Dec 15, 2025 | My sole-authored paper Beyond Distributions: Geometric Action Control for Continuous Reinforcement Learning has been accepted to ICLR 2026 (CORE A*). 🎉 |
| Dec 10, 2025 | My first-authored paper Scalable and Safe Multi-Agent Coordination with Reconstructed Level-k Monte Carlo Tree Search has been accepted to AAMAS 2026 (CORE A*). 🎉 |
| Apr 01, 2025 | 🏆 Awarded a £1,800 Research Mobility Fund from the University of Glasgow College of Science and Engineering for international research collaboration. |