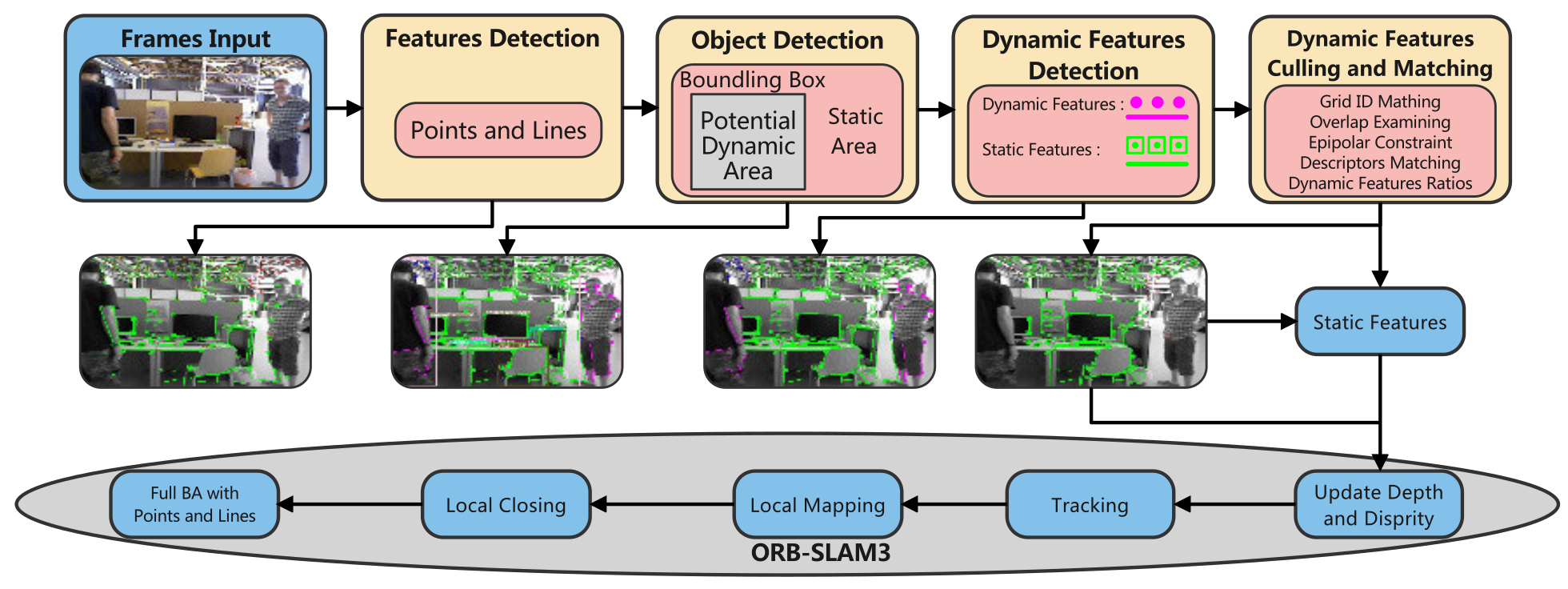
DPL-SLAM: Enhancing Dynamic Point-Line SLAM Through Dense Semantic Methods
This paper presents a novel SLAM system, Semantic Point and Line Features SLAM (DPL-SLAM). By using dection algorithm and LK flow constrains, our proposed SLAM framework can handle dynamic environments and can be used for real-time operation.