DPL-SLAM: Enhancing Dynamic Point-Line SLAM Through Dense Semantic Methods
Safety-Critical Multi-Agent MCTS for Unsignalized Intersections
Introduction
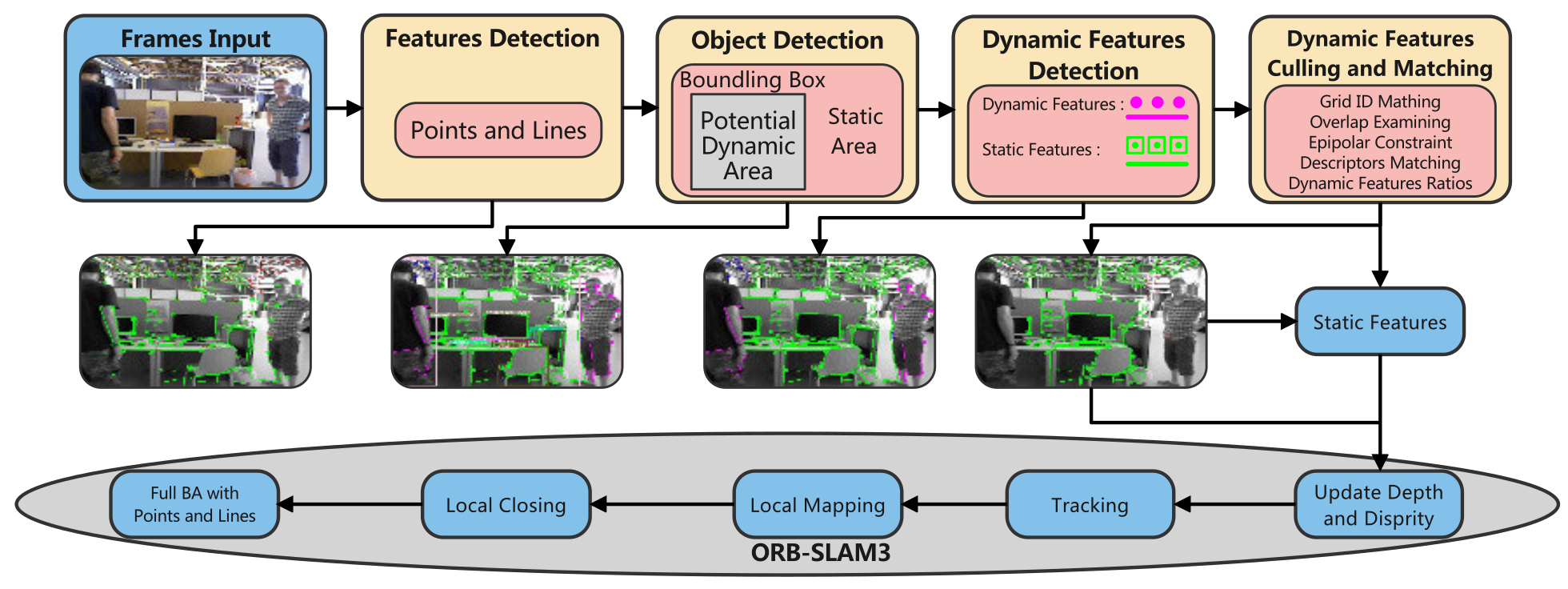
Fig. 1: Workflow of our DPL-SLAM system. The dynamic object clearing system works in four stages. It begins by extracting point-line features from input images. Then, it identifies potential dynamic regions through object detection and epipolar constraint validation. Next, depending on the proportion of dynamic features within each box, it selectively removes features. Lastly, it updates the remaining stable features for camera pose recovery in the backend processing. This system effectively manages dynamic object exclusion in SLAM operations.
This paper presents a novel SLAM system, Semantic Point and Line Features SLAM (DPL-SLAM). By using dection algorithm and LK flow constrains, our proposed SLAM framework can handle dynamic environments and can be used for real-time operation.