
Contingency-Aware Spatiotemporal Optimization for Safe Autonomous Vehicle Trajectory Planning
Introduction
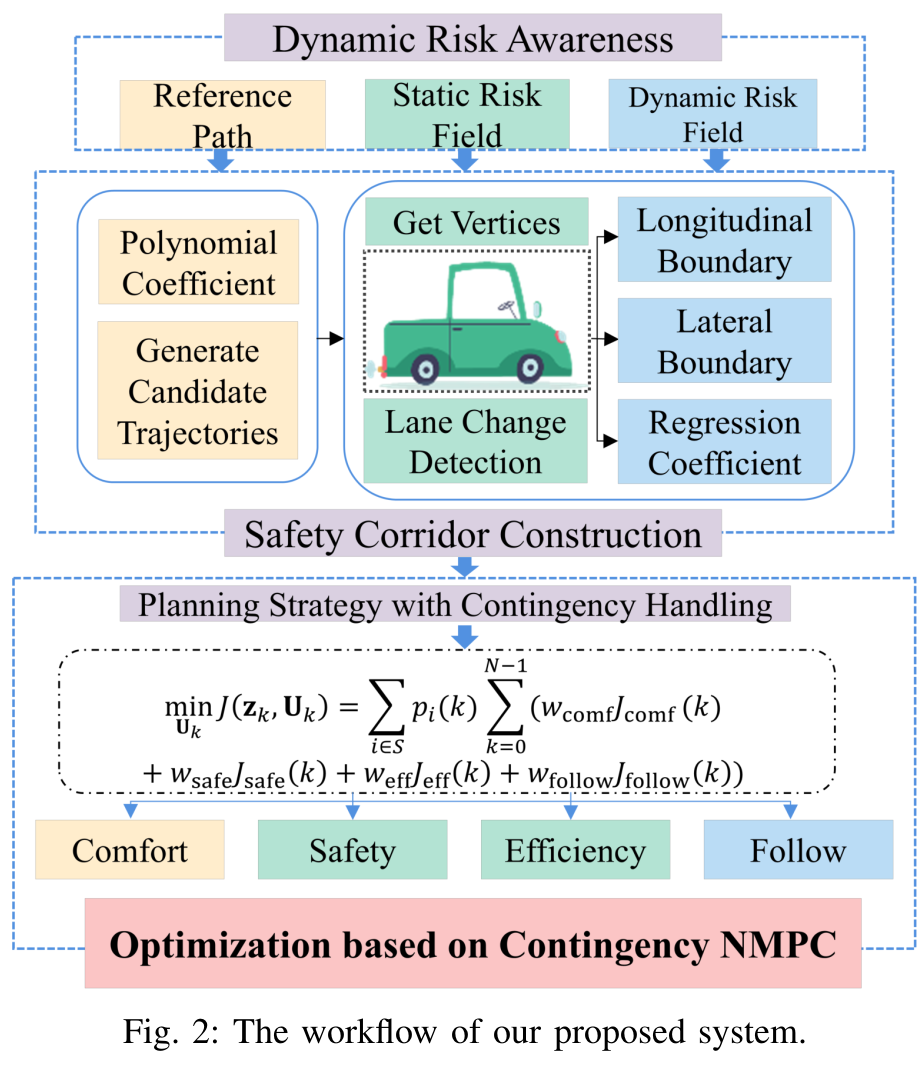
This paper presents a contingency-aware spatiotemporal optimization framework that integrates dynamic risk assessment and trajectory optimization to ensure the autonomous host vehicle (HV) achieve safer, more efficient lane changes.
Performance Under Different Uncertainty of SV2 (ar=1)
To validate our prediction-aware NMPC with contingency handling, we tested its adaptability across varying SV2 accelerations while balancing safety, efficiency, and comfort.
Case 1.1: SV2 is located behind the HV on its target lane, with an acceleration of 1 m/s².
Case 1.2: SV2 is located behind the HV on its target lane, with an acceleration of 2 m/s².
Case 1.3: SV2 is located behind the HV on its target lane, with an acceleration of 3 m/s².
Conclusion
This paper presents a comprehensive framework for autonomous lane-changing that tackles safety, comfort, and efficiency in dynamic traffic environments. Key components include a DRF for risk assessment, a Spatiotemporal Safety Corridor for constraint management, and a prediction-aware NMPC that anticipates responses of nearby vehicles. The DRF models inter-vehicle interactions, while the spatiotemporal safety corridor uses regression-based boundaries for efficient constraint handling. Our prediction-aware NMPC, leveraging an IDM-based model, enables responsive and efficient lane changes by adapting to rear vehicle behaviors. The framework adjusts paths for efficiency or conservatism based on the rear vehicle's acceleration, maintaining safety margins under varying conditions. Simulations confirm stability, with smooth trajectories and minimal accelerations, balancing efficiency, safety, comfort.