
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
projects
DPL-SLAM: Enhancing Dynamic Point-Line SLAM Through Dense Semantic Methods
This paper presents a novel SLAM system, Semantic Point and Line Features SLAM (DPL-SLAM). By using dection algorithm and LK flow constrains, our proposed SLAM framework can handle dynamic environments and can be used for real-time operation. 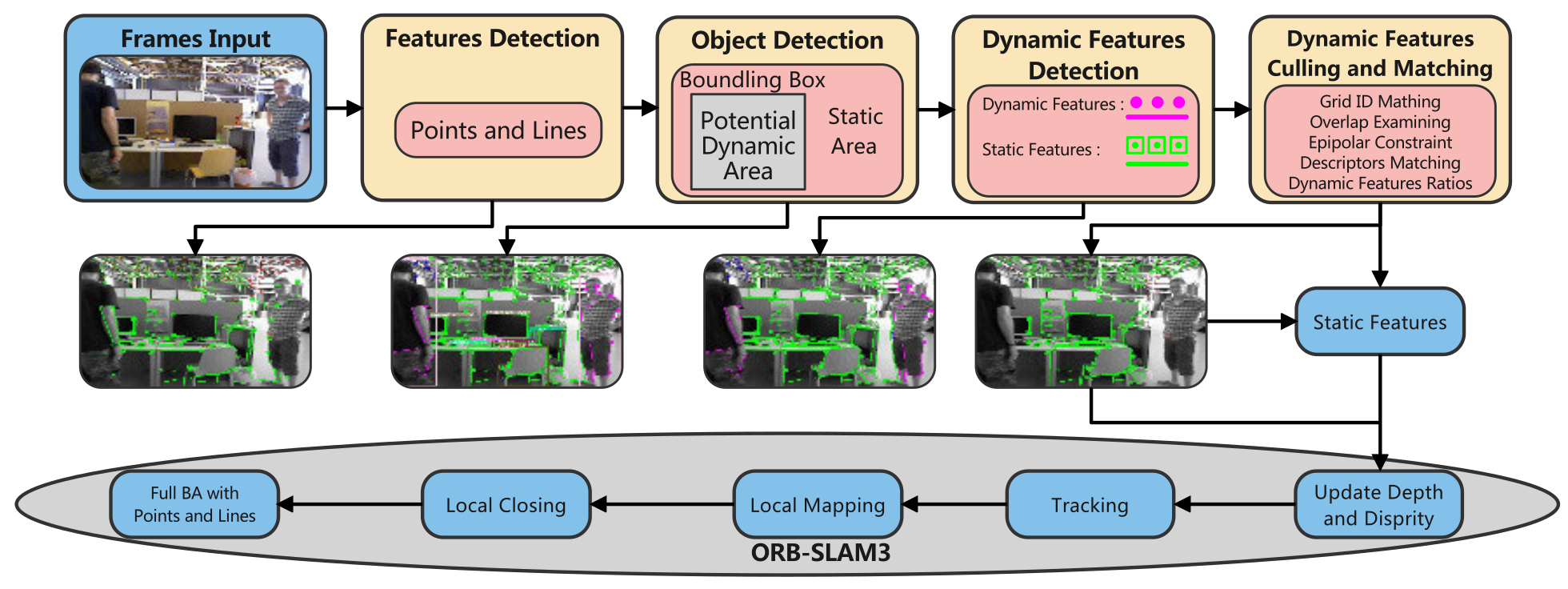
SLAM2: Enhancing Dynamic Point-Line SLAM Through Dense Semantic Methods
we present SLAM^2, a novel semantic RGB-D SLAM system that can obtain accurate estimation of the camera pose and the 6DOF pose of other objects, resulting in complete and clean static 3D model mapping in dynamic environments. 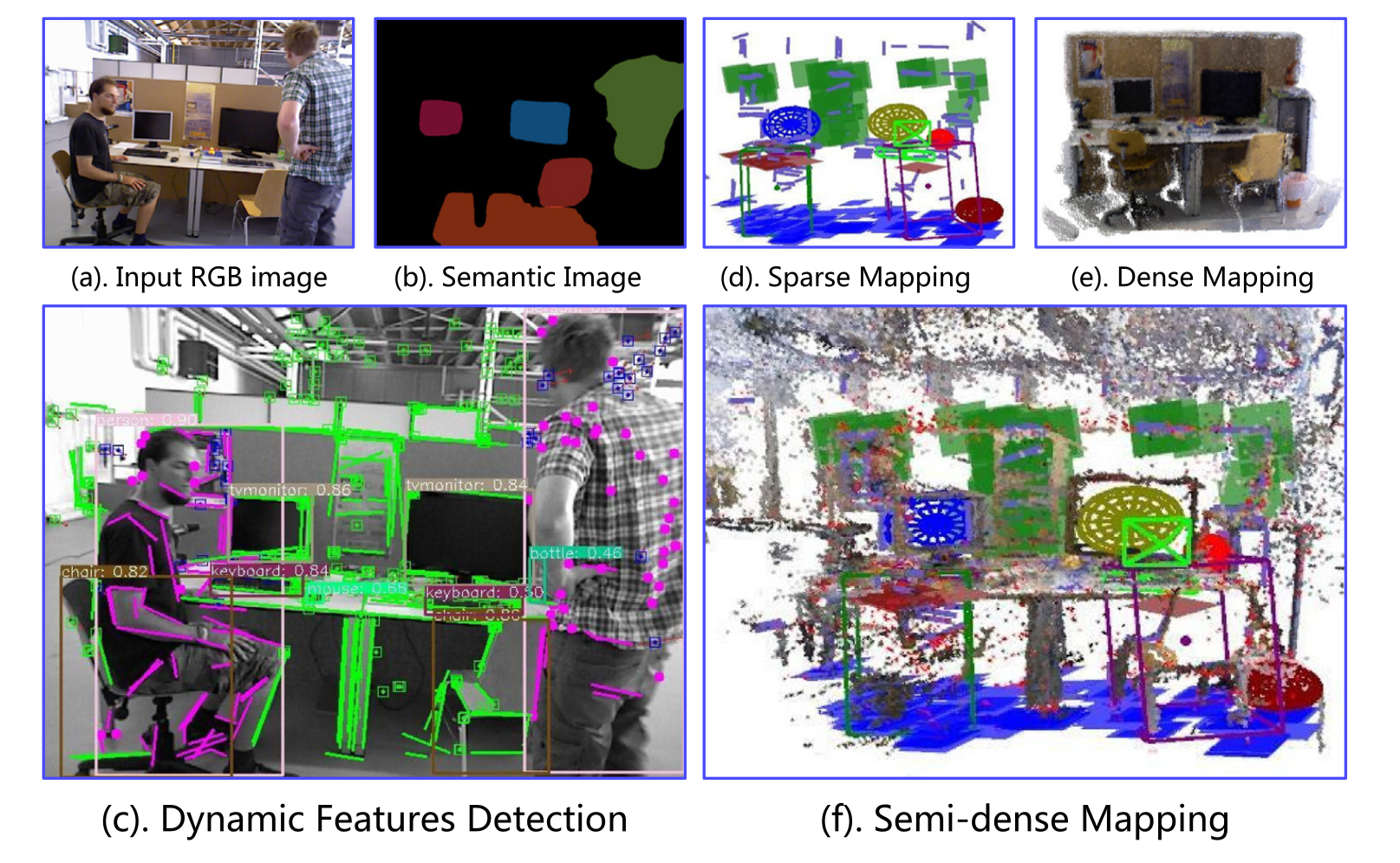
Dynamic Risk-Aware Trajectory Planning for Autonomous Vehicles: A Two-Stage Optimization with Space-Time Graphs
This paper introduces a two-stage trajectory planning framework that considers safety, efficiency, and ride comfort simultaneously in dynamic environments. 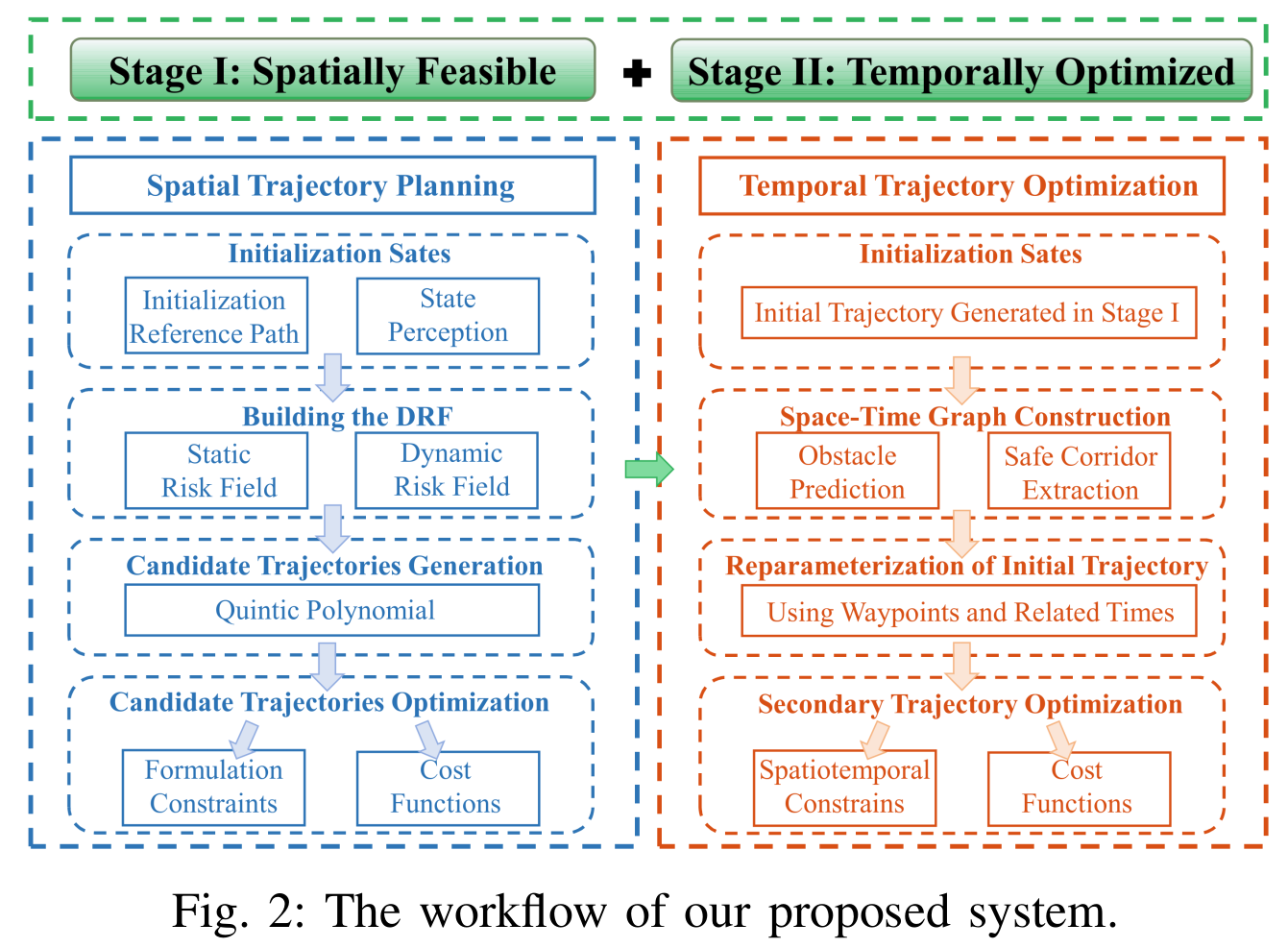
A Conflicts-free, Speed-lossless KAN-based Reinforcement Learning Decision System for Interactive Driving in Roundabouts
The proposed algorithm employs a deep Q-learning network to effectively learn safe and efficient driving strategies in complex multi-vehicle roundabouts. 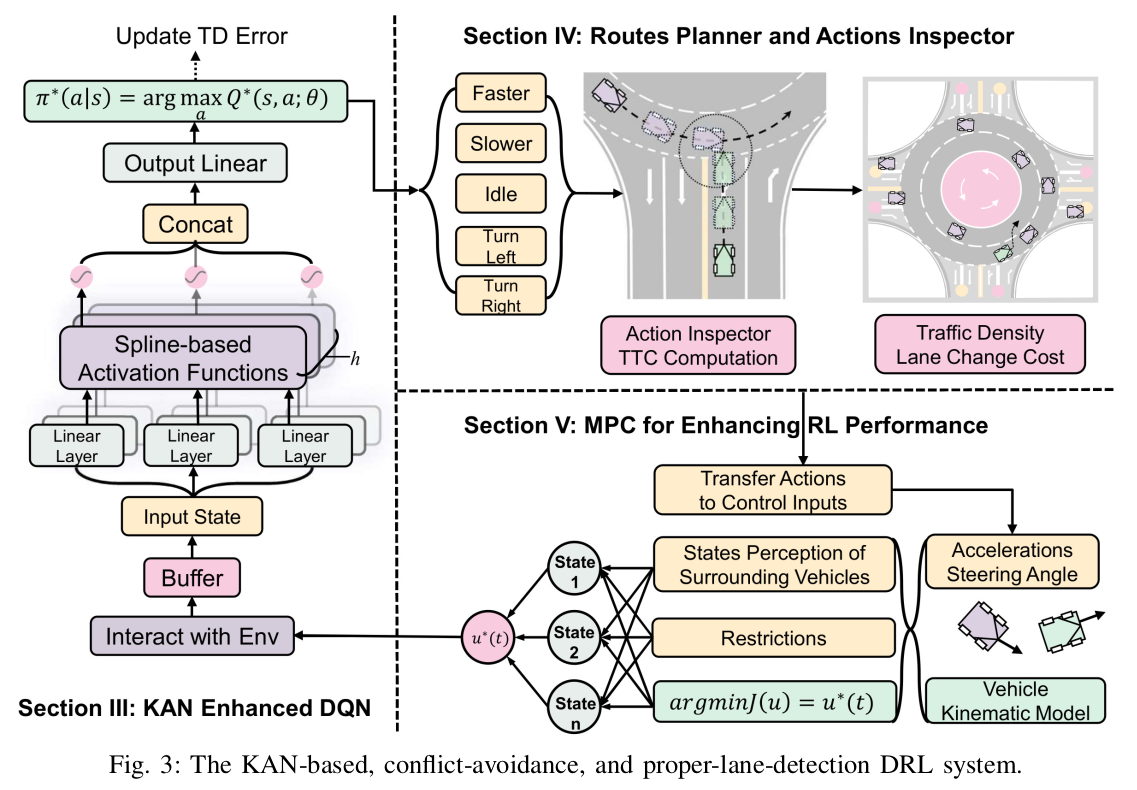
Contingency-Aware Spatiotemporal Optimization for Safe Autonomous Vehicle Trajectory Planning
This paper presents a contingency-aware spatiotemporal optimization framework that integrates dynamic risk assessment and trajectory optimization to ensure the autonomous host vehicle (HV) achieve safer, more efficient lane changes. 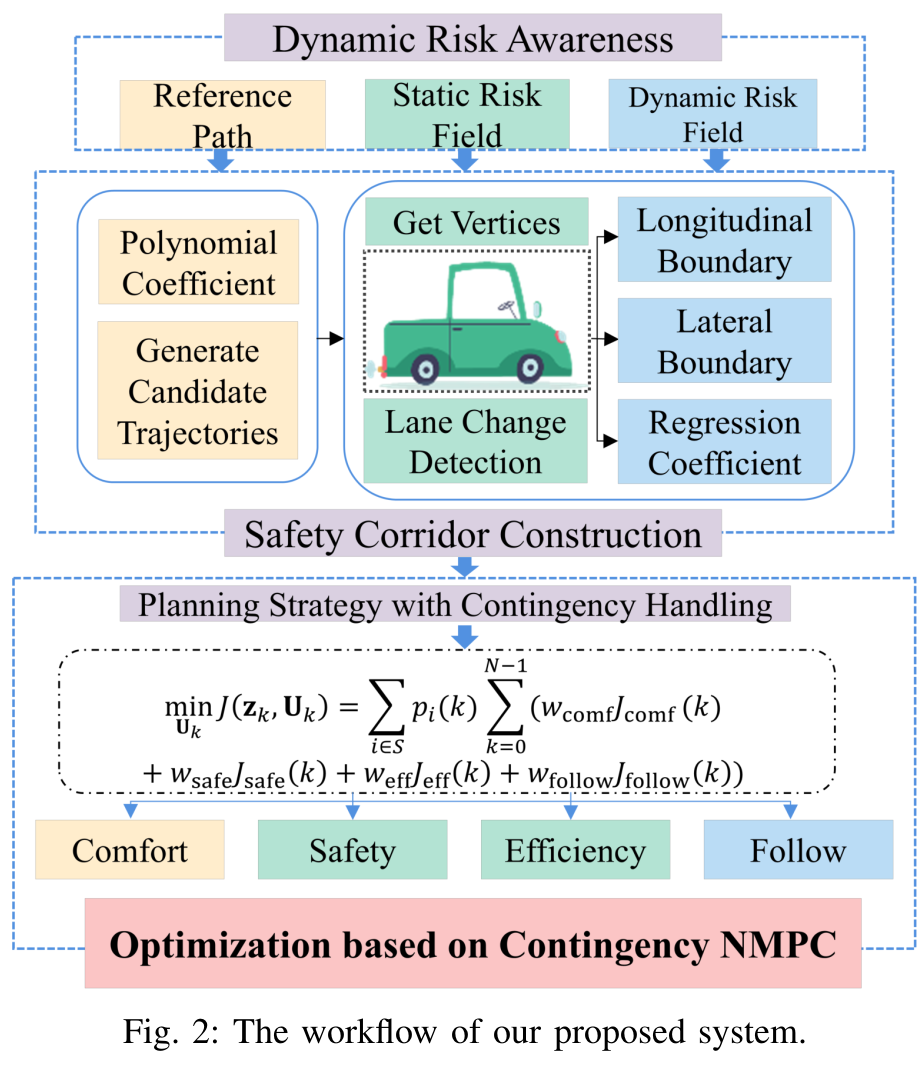
MCTS-Level-k
This paper proposes a scalable multi-vehicle decision-making framework that integrates Level-k recursive reasoning with Monte Carlo Tree Search for efficient coordination at unsignalized intersections. 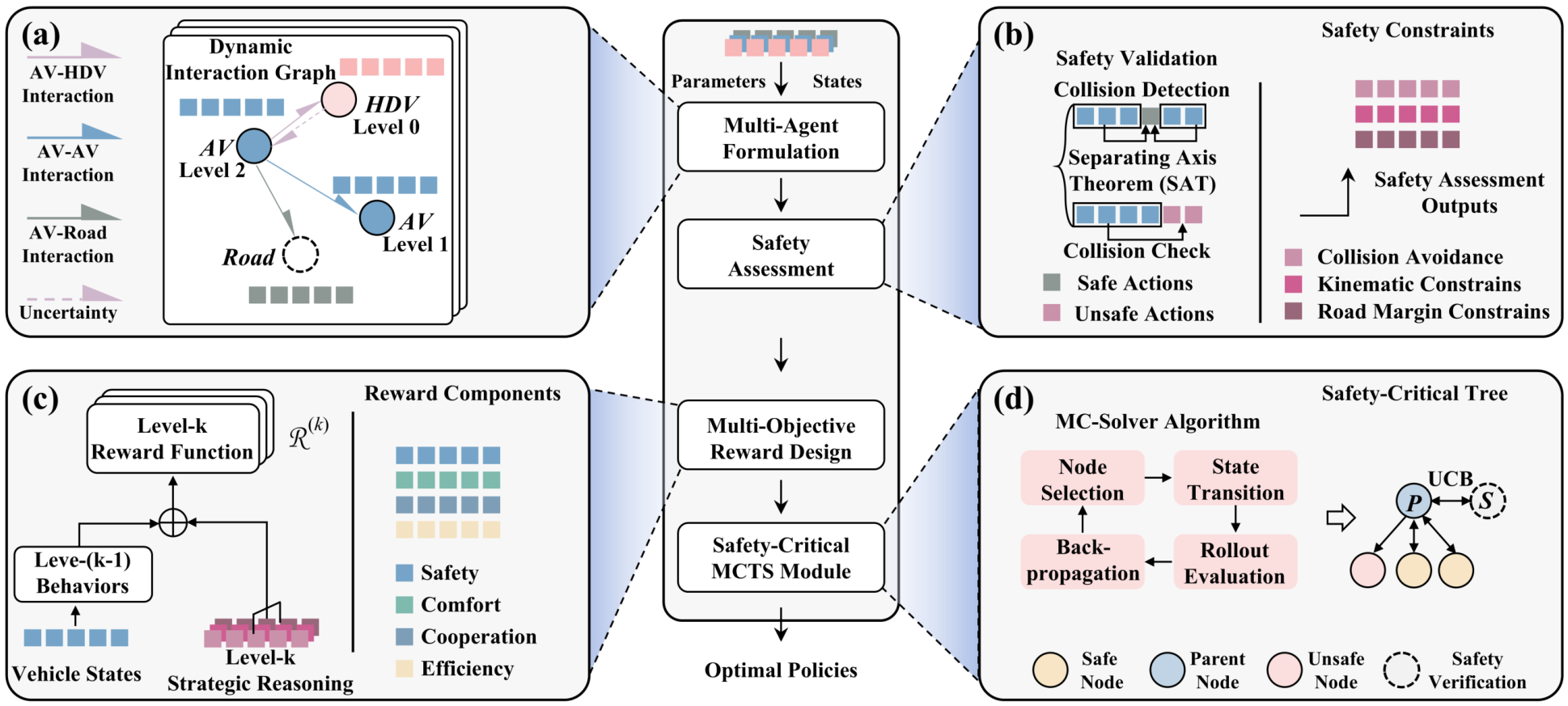
publications
DPL-SLAM: enhancing dynamic point-line SLAM through dense semantic methods Permalink
Published in IEEE Sensors Journal, 2024
This paper presents a novel SLAM system, Semantic Point and Line Features SLAM (DPL-SLAM). By using dection algorithm and LK flow constrains, our proposed SLAM framework can handle dynamic environments and can be used for real-time operation.
Recommended citation: Z. Lin, Q. Zhang, Z. Tian, P. Yu, and J. Lan, "DPL-SLAM: Enhancing Dynamic Point-Line SLAM Through Dense Semantic Methods," IEEE Sens. J., vol. 24, no. 9, pp. 14596-14607, 2024.
Download Paper | View Project
Balanced reward-inspired reinforcement learning for autonomous vehicle racing
Published in 6th Annual Learning for Dynamics & Control Conference, 2024
Simulation results on a physical engine demonstrate that the proposed algorithm outperforms other DRL algorithms in achieving safer control during sharp bends, fewer collisions into track boundaries, and higher training quality among multiple tracks.
Recommended citation: T. Zhen, D. Zhao, Z. Lin, et al., "Balanced reward-inspired reinforcement learning for autonomous vehicle racing," in Proc. L4DC., 2024, pp. 628-640.
Download Paper
A conflicts-free, speed-lossless KAN-based reinforcement learning decision system for interactive driving in roundabouts Permalink
Published in arXiv preprint arXiv:2408.08242, 2024
The proposed algorithm employs a deep Q-learning network to effectively learn safe and efficient driving strategies in complex multi-vehicle roundabouts
Recommended citation: Z. Lin, et al, "A conflicts-free, speed-lossless KAN-based reinforcement learning decision system for interactive driving in roundabouts," IEEE Trans. Intell. Transp. Syst., vol. 26, no. 10, pp. 16377-16390, Oct. 2025.
Download Paper | View Project
Enhanced visual slam for collision-free driving with lightweight autonomous cars Permalink
Published in Sensors, 2024
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera
Recommended citation: Z. Lin, Z. Tian, Q. Zhang, Z. Zhuang, and J. Lan, "Enhanced visual slam for collision-free driving with lightweight autonomous cars," Sensors 2024, 24, 6258.
Download Paper
Efficient and balanced exploration-driven decision making for autonomous racing using local information Permalink
Published in IEEE Transactions on Intelligent Vehicles, 2024
To solve traditional limitions on DRL, this paper develops an improved PPO by introducing a curiosity mechanism, a balanced reward function, and an image efficient actor-critic network.
Recommended citation: Z. Tian, et al, "Efficient and balanced exploration-driven decision making for autonomous racing using local information," IEEE Trans. Intell. Veh.,pp 1-17, 2024.
Download Paper
SLAM2: Simultaneous Localization and Multimode Mapping for indoor dynamic environments Permalink
Published in Pattern Recognition, 2025
we present SLAM^2, a novel semantic RGB-D SLAM system that can obtain accurate estimation of the camera pose and the 6DOF pose of other objects, resulting in complete and clean static 3D model mapping in dynamic environments.
Recommended citation: Z. Lin, Q. Zhang, Z. Tian, et al., "SLAM2: Simultaneous Localization and Multimode Mapping for indoor dynamic environments," Pattern Recognit., vol. 158, p. 111054, 2025.
Download Paper | View Project
KAN-LSTM Enhanced Multi-Agent Advantage Actor-Critic Reinforcement Learning for Autonomous Ramp Merging Permalink
Published in IEEE Transactions on Vehicular Technology, 2025
This paper proposes a novel KL-MA2C framework, which integrates Kolmogorov-Arnold Networks (KAN) and Long Short-Term Memory (LSTM) into the Multi-Agent Advantage Actor-Critic (MA2C) algorithm.
Recommended citation: Z. Lin, et al, "KAN-LSTM Enhanced Multi-Agent Advantage Actor-Critic Reinforcement Learning for Autonomous Ramp Merging," IEEE Trans. Veh. Technol., pp 01-12, 2025.
Download Paper
Contingency-Aware Spatiotemporal Optimization for Safe Autonomous Vehicle Trajectory Planning Permalink
Published in IEEE Transactions on Transactions on Intelligent Transportation Systems, 2025
This paper presents a contingency-aware spatiotemporal optimization framework that integrates dynamic risk assessment and trajectory optimization to ensure the autonomous host vehicle (HV) achieve safer, more efficient lane changes.
Recommended citation: Z. Lin, et al, "Contingency-Aware Spatiotemporal Optimization for Safe Autonomous Vehicle Trajectory Planning," IEEE Trans. Intell. Transp. Syst., vol. 26, no. 11, pp. 18487-18499, Nov. 2025.
Download Paper | View Project
Safety-Critical Multi-Agent MCTS for Mixed Traffic Coordination at Unsignalized Intersections Permalink
Published in IEEE Transactions on Transactions on Intelligent Transportation Systems, 2025
This paper proposes a safety-critical multi-agent Monte Carlo tree search (MCTS) framework that integrates deterministic and probabilistic predictions to enable cooperative decision making in complex intersection scenarios.
Recommended citation: Z. Lin, et al, "Safety-Critical Multi-Agent MCTS for Mixed Traffic Coordination at Unsignalized Intersections," IEEE Trans. Intell. Transp. Syst., vol. 26, no. 11, pp. 18992-19006, Nov. 2025
Download Paper
Evaluating scenario-based decision-making for interactive autonomous driving using rational criteria: A survey Permalink
Published in IEEE Transactions on Transactions on Intelligent Transportation Systems, 2025
This survey reviews the application of DRL algorithms in autonomous driving across typical scenarios, summarizing road features and recent advancements. The scenarios include highways, on-ramp merging, roundabouts, and unsignalized intersections. Furthermore, DRL-based algorithms are evaluated based on five rationale criteria: driving safety, driving efficiency, training efficiency, unselfishness, and interpretability (DDTUI).
Recommended citation: Z. Tian, Z. Lin et al, "Evaluating scenario-based decision-making for interactive autonomous driving using rational criteria: A survey," IEEE Trans. Intell. Transp. Syst., pp 01-20, 2025.
Download Paper
Uncertainty-Aware Roundabout Navigation: A Switched Decision Framework Integrating Stackelberg Games and Dynamic Potential Fields Permalink
Published in IEEE Transactions on Vehicular Technology, 2025
This paper presents a switched decision system that combines game theory and potential fields to enable robust navigation in roundabouts.
Recommended citation: Z. Lin et al, "Uncertainty-Aware Roundabout Navigation: A Switched Decision Framework Integrating Stackelberg Games and Dynamic Potential Fields," IEEE Trans. Veh. Technol., pp 01-13, 2025.
Download Paper
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.